|
Georgios Georgakis
I am a Robotics Technologist at the NASA-Jet Propulsion Laboratory.
My research interests lie at the intersection of computer vision and machine learning, with applications in robotics.
My long-term goal is enabling the exploration and understanding of our solar system by developing generalizable,
learning-based perception and navigation algorithms for robotic systems,
and by designing AI models that maximize the scientific return from space mission data.
Prior to joining JPL, I was a Postdoctoral Researcher in the GRASP Lab at the University of Pennsylvania, advised
by Kostas Daniilidis. During my PostDoc I worked on vision-based semantic navigation in novel environments
for the tasks of exploration, object-goal navigation, and vision and language navigation (VLN).
I received my Ph.D from the Department of Computer Science
at George Mason University, advised by Jana Kosecka.
I completed my Diploma in Computer Engineering from the
Technical University of Crete in Greece, where I worked with Dr. Michail G. Lagoudakis on
landmark recognition and localization for robotic soccer.
I spent time as a research intern at Siemens and United Imaging Intelligence (UII).
My method for 3D human reconstruction was integrated in a new generation of
medical CT scanners capable of modeling patients in 3D and automating the scanning process. The scanners
have been deployed in more than 300 hospitals worldwide including in Cyprus!
Email /
CV /
Scholar /
LinkedIn /
Github
|

|
|
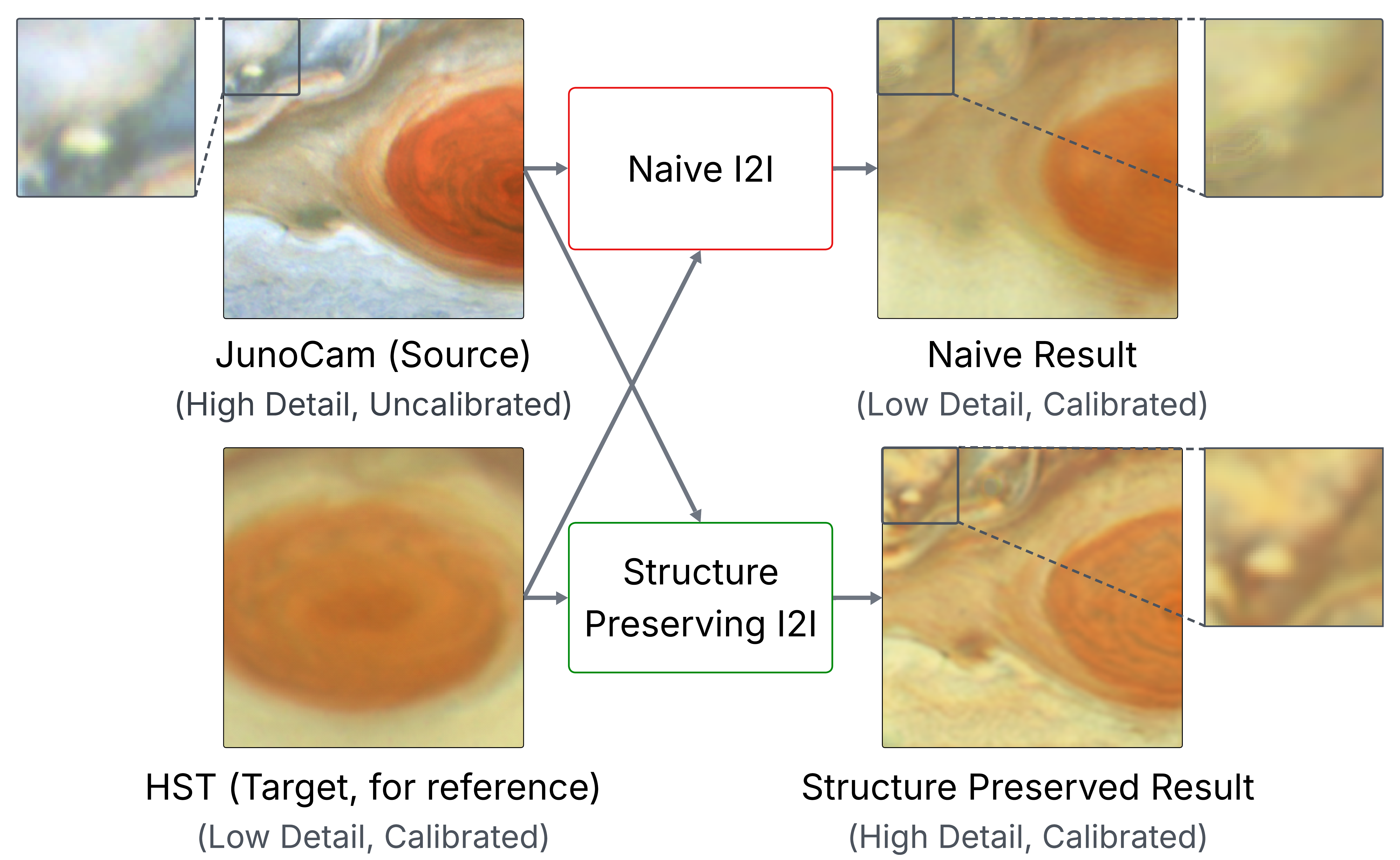
Structure-Preserving Unpaired Image Translation to Photometrically Calibrate JunoCam with Hubble Data
Aditya Singh,
Shrey Shah,
Ramanakumar Sankar,
Emma Dahl,
Gerald Eichstädt,
Georgios Georgakis,
Bernadette Bucher
arXiv:2511.22668 (under submission), 2025
pdf / video
|
|
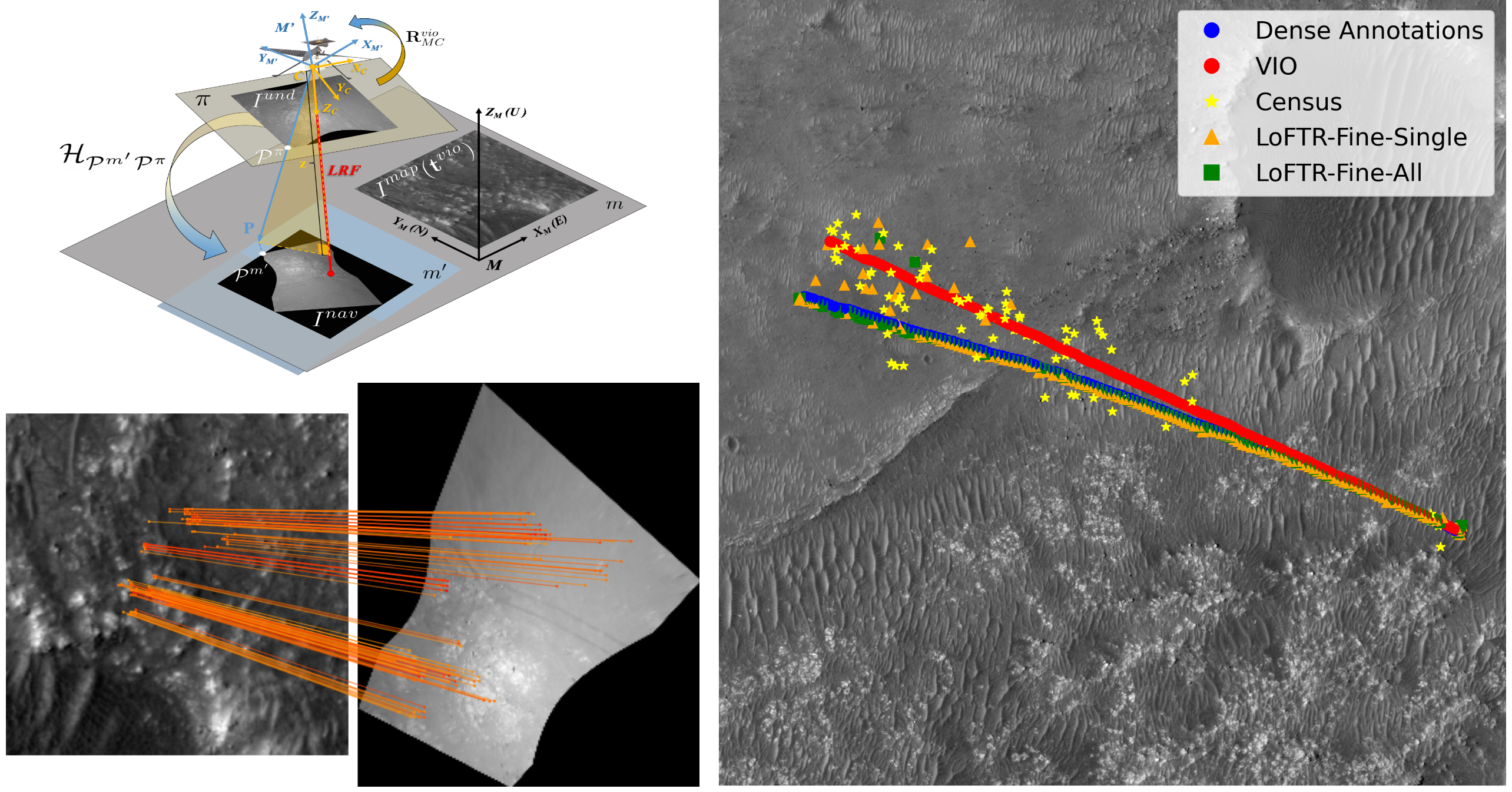
A Map-based Localization System for Ingenuity using Deep Image Matching
Georgios Georgakis,
Dario Pisanti,
Nathan Williams,
Cecilia Mauceri,
Gerik Kubiak,
Adnan Ansar,
Roland Brockers
IEEE Transactions on Field Robotics (T-FR) Special Issue on Space Robotics, 2025
pdf
|
|
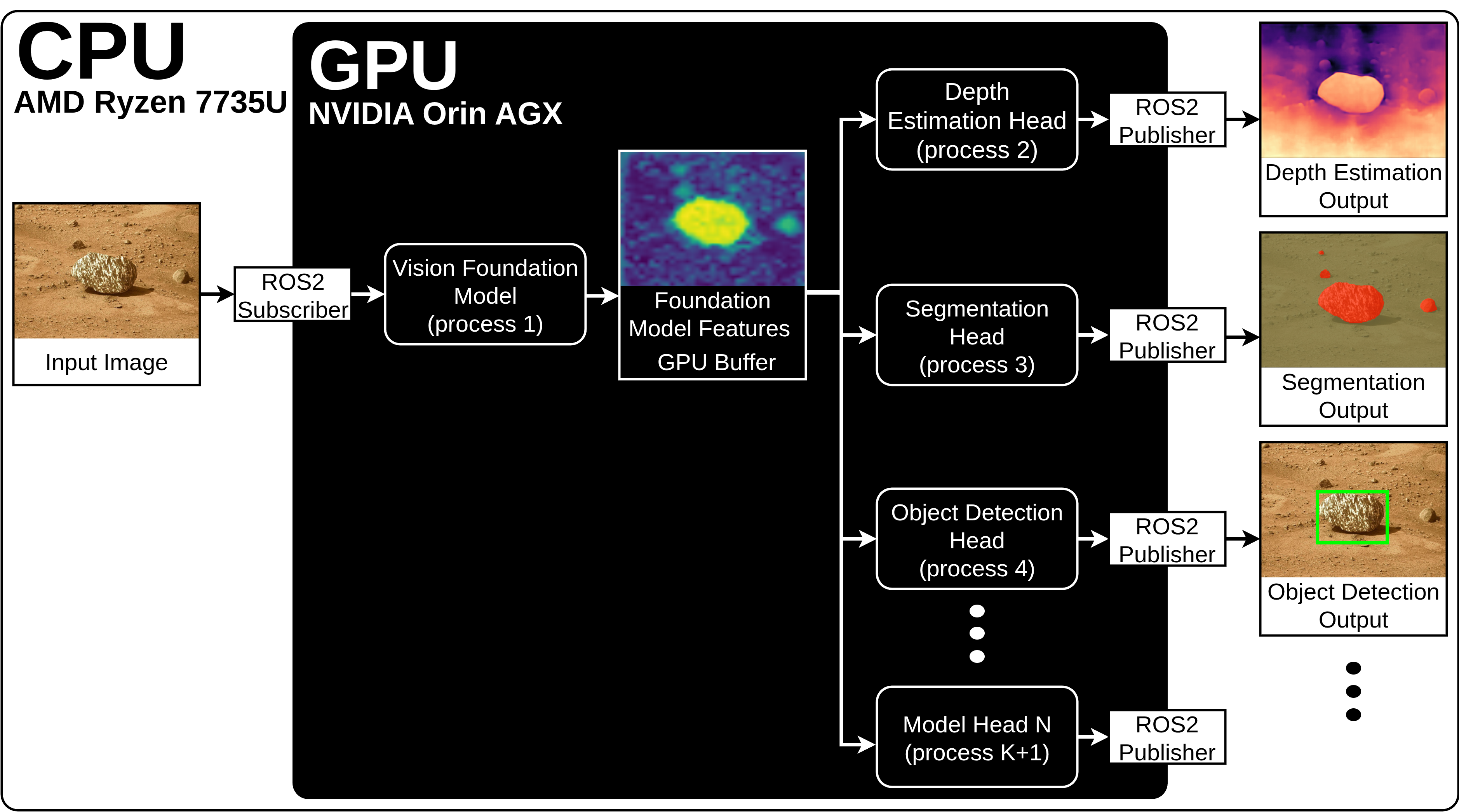
Visual Perception Engine: Fast and Flexible Multi-Head Inference for Robotic Vision Tasks
Jakub Lucki,
Jonathan Becktor,
Georgios Georgakis,
Rob Royce,
Shehryar Khattak
arXiv:2508.11584 (under submission), 2025
pdf / code
|
|
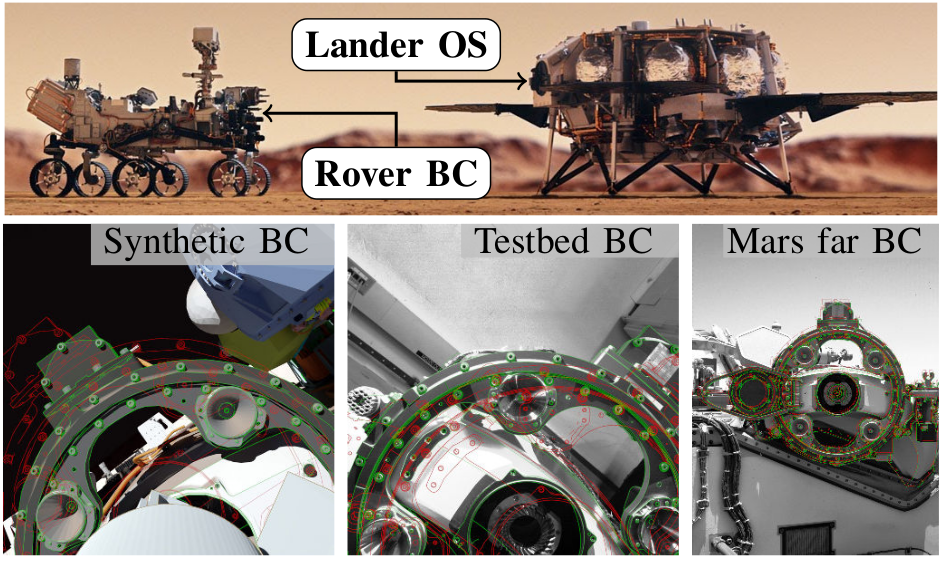
Robust Visual Localization in Compute-Constrained Environments by Salient Edge Rendering and Weighted Hamming Similarity
Tu-Hoa Pham,
Philip Bailey,
Daniel Posada,
Georgios Georgakis,
Jorge Enriquez,
Surya Suresh,
Marco Dolci,
Philip Twu
IEEE Robotics and Automation Letters (RA-L), 2025
pdf
|
|
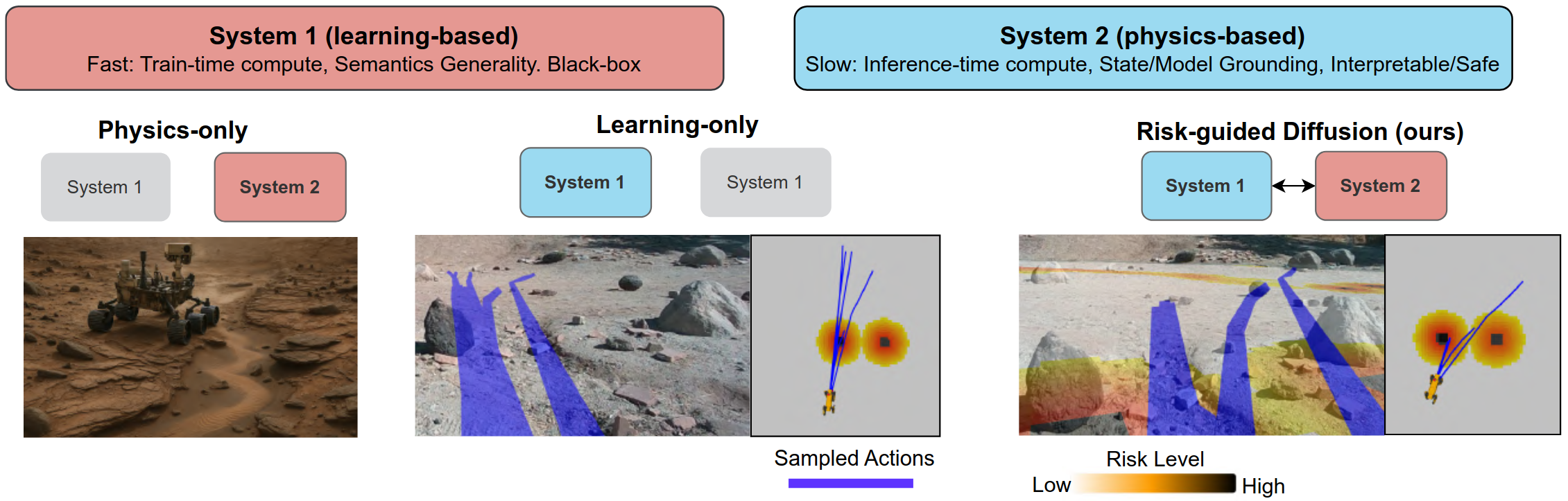
Risk-Guided Diffusion: Toward Deploying Robot Foundation Models In Space, Where Failure Is Not An Option
Rohan Thakker,
Adarsh Patnaik,
Vince Kurtz,
Jonas Frey,
Jonathan Becktor,
Sangwoo Moon,
Rob Royce,
Marcel Kaufmann,
Georgios Georgakis,
Pascal Roth,
Joel Burdick,
Marco Hutter,
Shehryar Khattak
Workshop on Reliable Robotics: Safety and Security in the Face of Generative AI at RSS, 2025 (Best paper award)
pdf
|
|
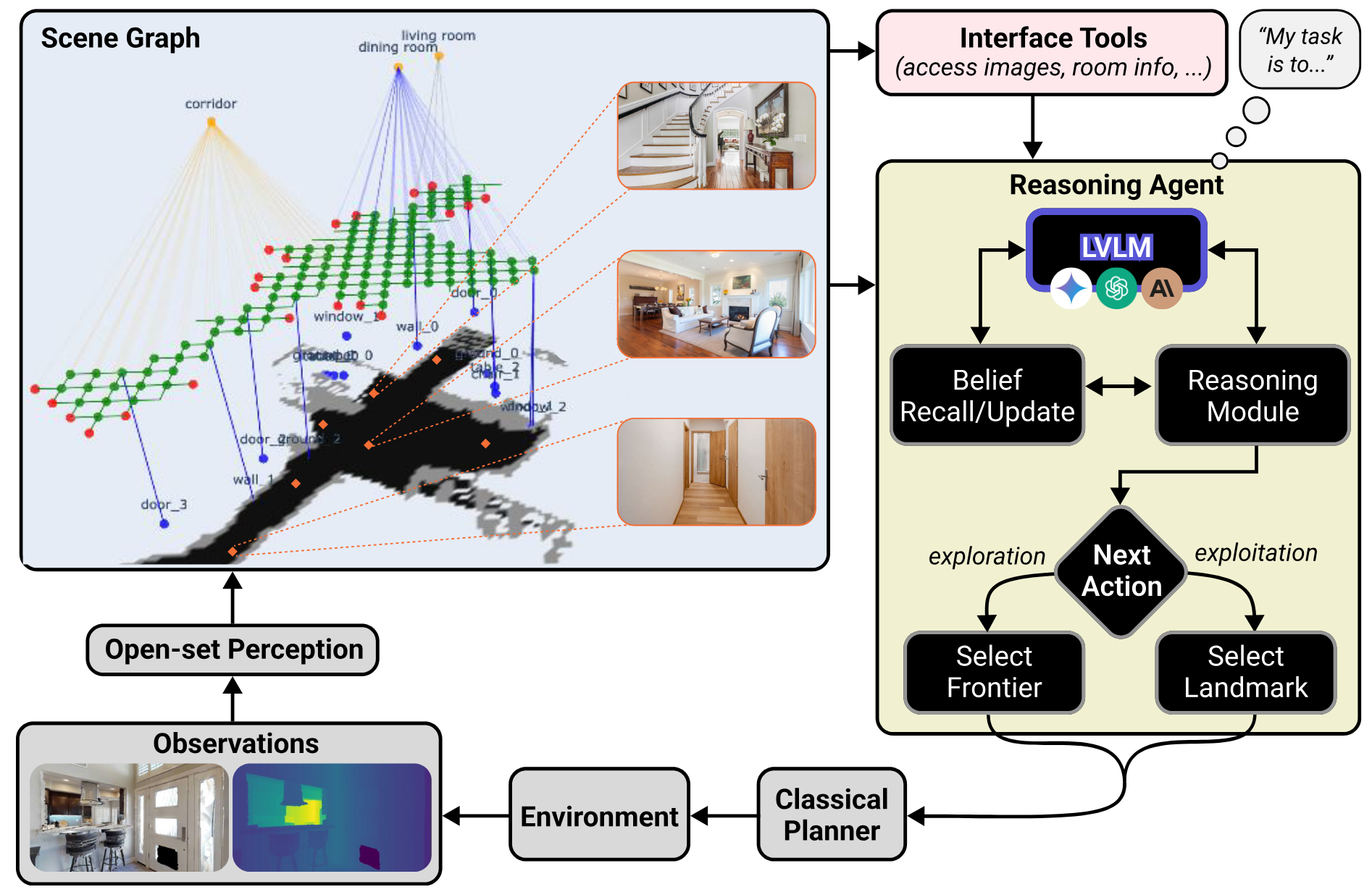
General-Purpose Robotic Navigation via LVLM-Orchestrated Perception, Reasoning, and Acting
Bernard Lange,
Anil Yildiz,
Mansur Arief,
Shehryar Khattak,
Mykel Kochenderfer,
Georgios Georgakis
arXiv:2506.17462 (under submission), 2025
pdf
|
|
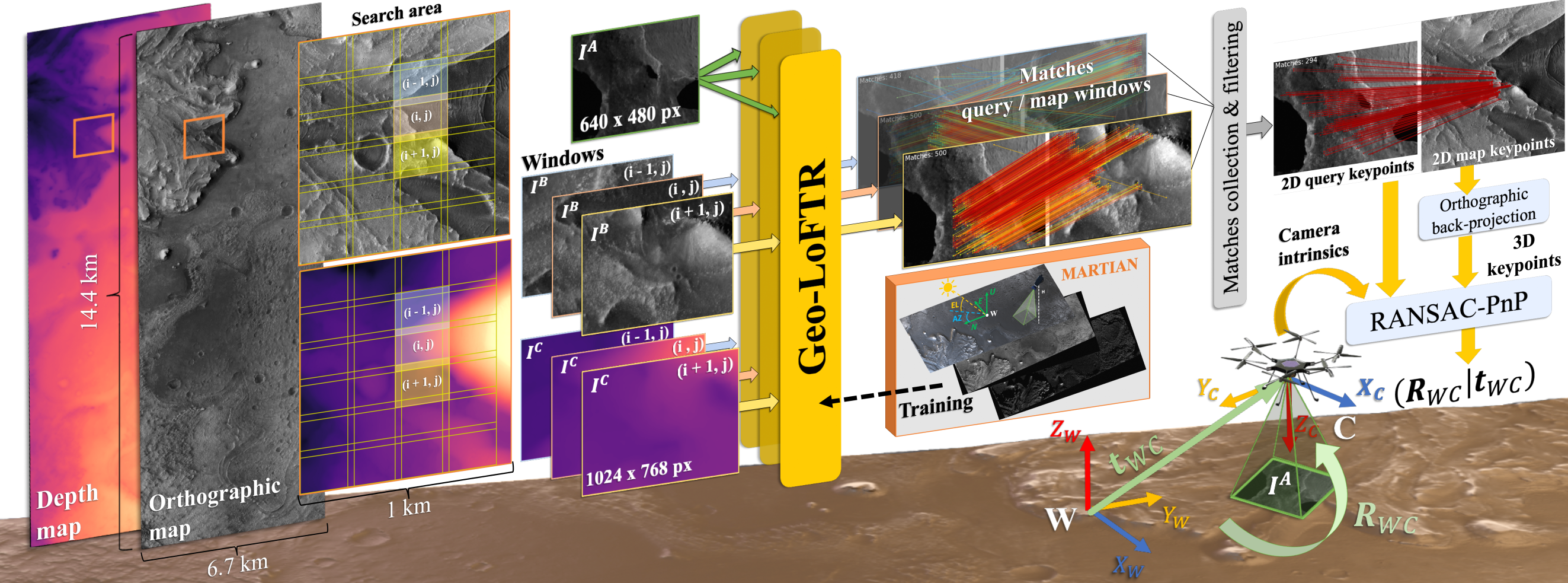
Vision-based Geo-Localization of Future Mars Rotorcraft in Challenging Illumination Conditions
Dario Pisanti,
Robert Hewitt,
Roland Brockers,
Georgios Georgakis
arXiv:2502.09795 (under submission), 2025
pdf / code-MbL / code-MARTIAN
|
|
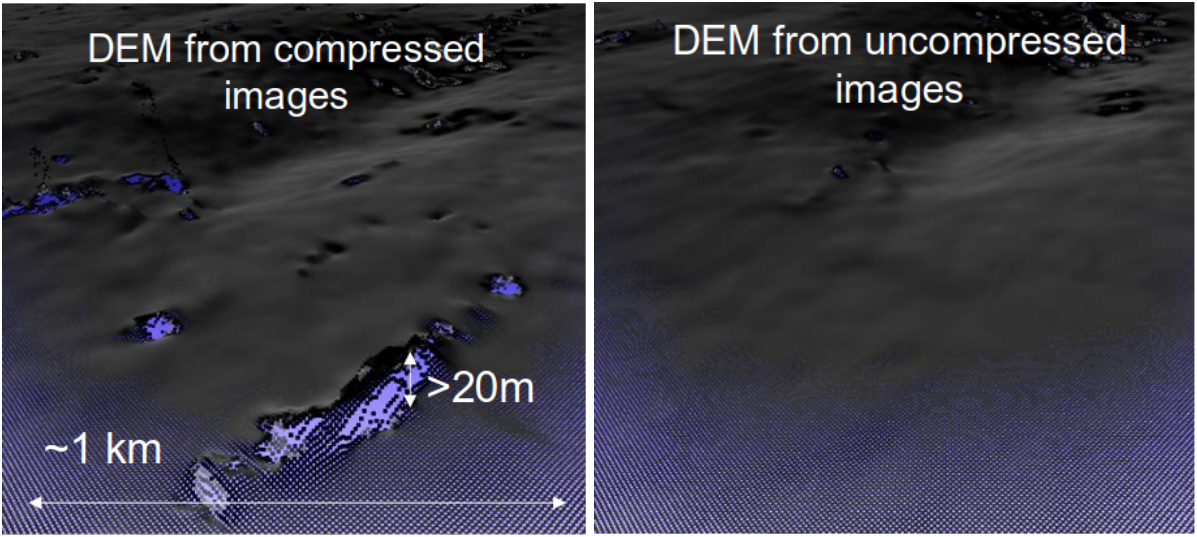
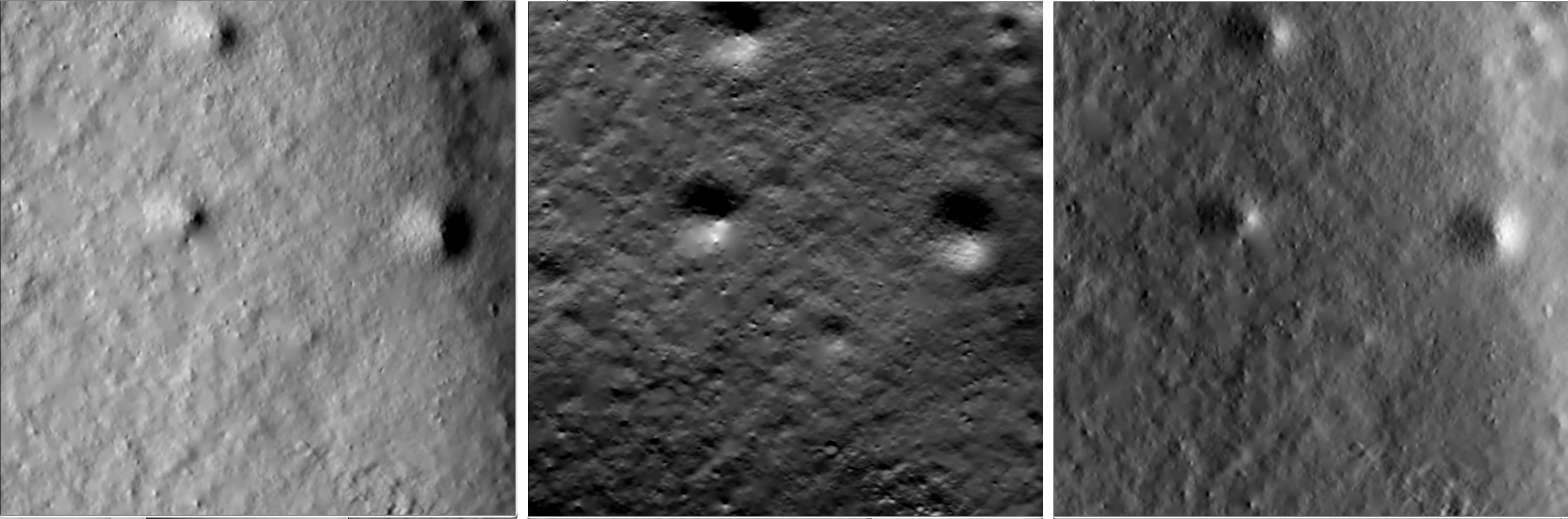
Enhancing the Quality of 3D Lunar Maps Using JAXA’s Kaguya Imagery
Yumi Iwashita,
Haakon Moe,
Yang Cheng,
Adnan Ansar,
Georgios Georgakis,
Adrian Stoica,
Kazuto Nakashima,
Ryo Kurazume,
Jim Torresen
IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2025
pdf
|
|
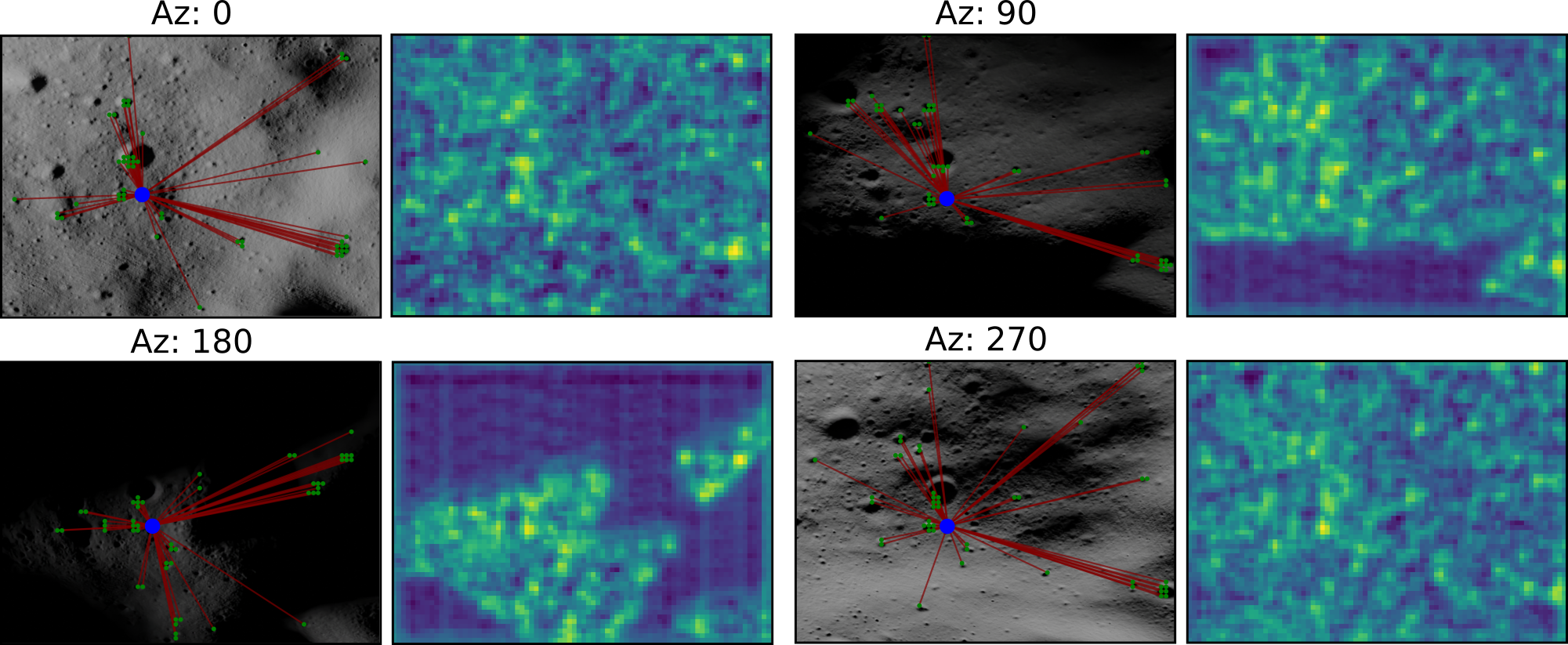
Illumination Invariant Image Matching for Lunar TRN
Noah Rothenberger,
Georgios Georgakis,
Yang Chen,
Adnan Ansar
American Institute of Aeronautics and Astronautics (AIAA) SciTech, 2025
pdf
|
|
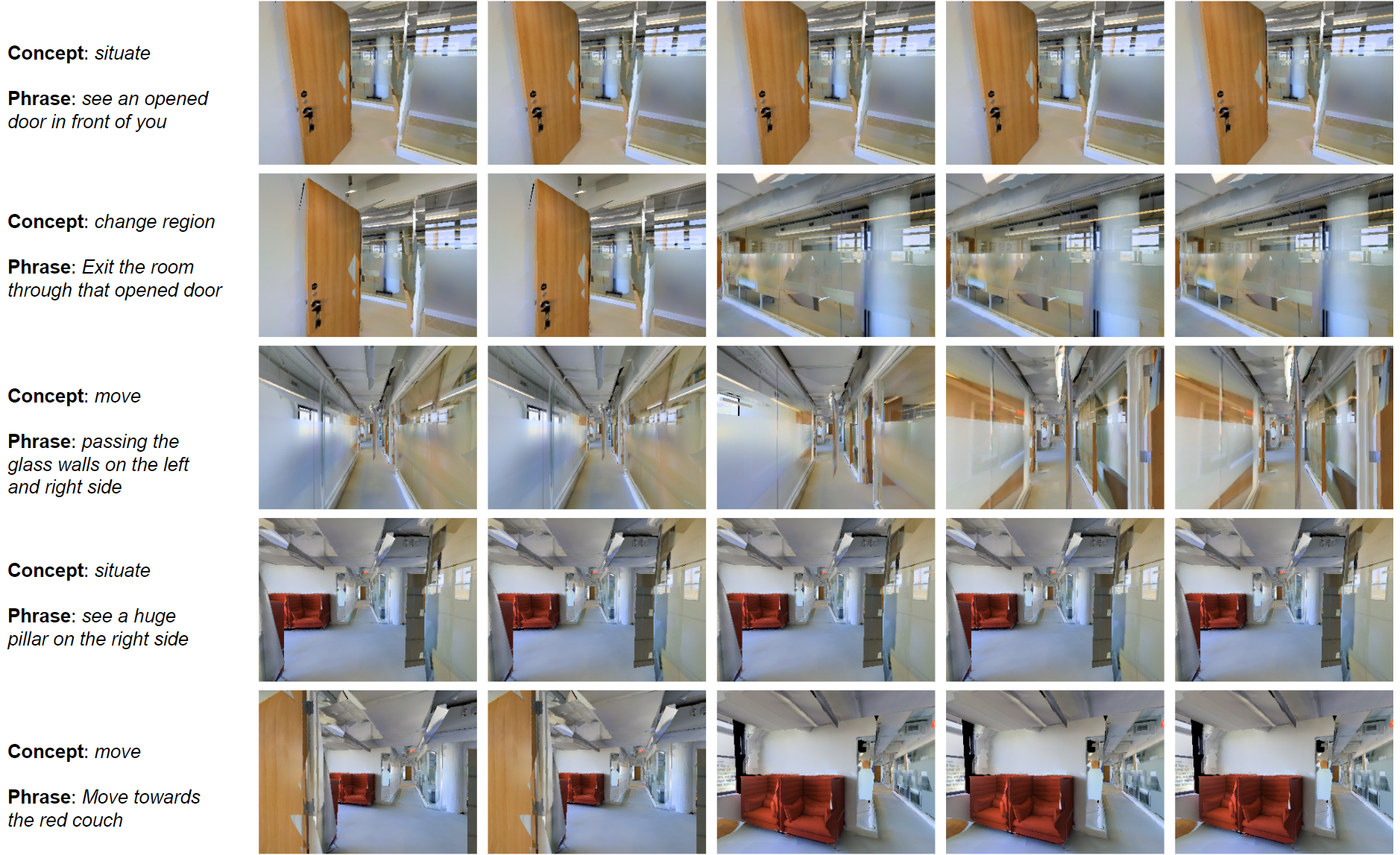
NAVCON: A Cognitively Inspired and Linguistically Grounded Corpus for Vision and Language Navigation
Karan Wanchoo,
Xiaoye Zuo,
Hannah Gonzalez,
Soham Dan,
Georgios Georgakis,
Dan Roth,
Kostas Daniilidis,
Eleni Miltsakaki
arXiv:2412.13026, 2024
pdf
|
|
Learning Illumination Invariant Features for Lunar South Pole with Deep Learning
Georgios Georgakis,
Adnan Ansar
Space Imaging Workshop (SIW), 2024
pdf
|
|
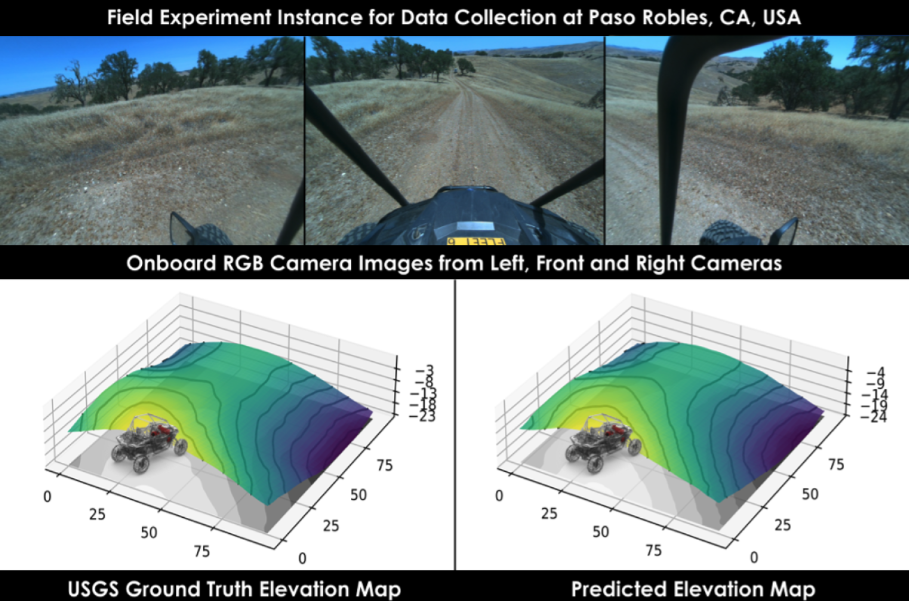
Pixel to Elevation: Learning to Predict Elevation Maps at Long Range using Images for Autonomous Offroad Navigation
Chanyoung Chung,
Georgios Georgakis,
Patrick Spieler,
Curtis Padgett,
Ali Agha,
Shehryar Khattak
IEEE Robotics and Automation Letters (RA-L), 2024
pdf / arXiv
|
|
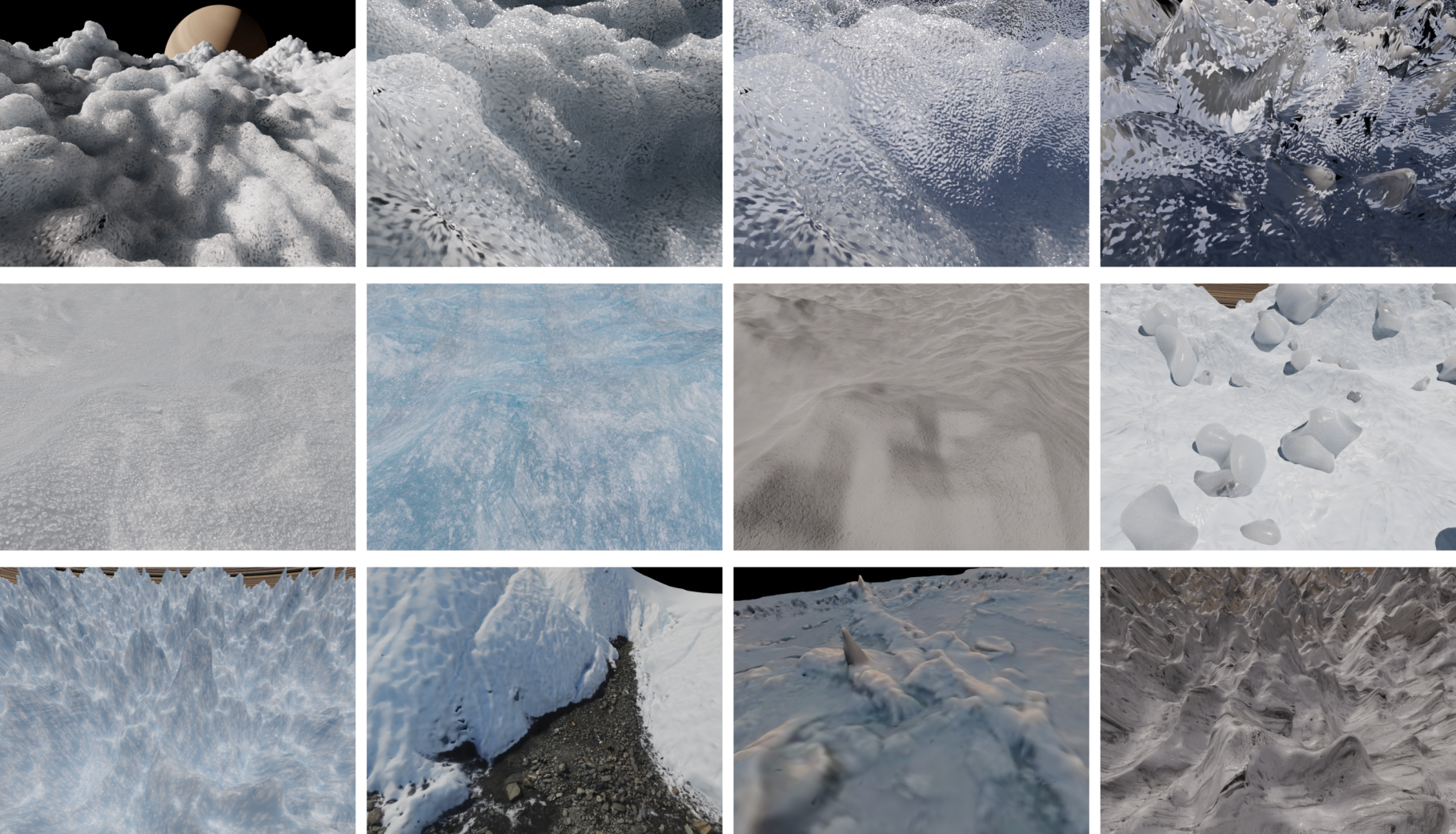
Icy Moon Surface Simulation and Stereo Depth Estimation for Sampling Autonomy
Ramchander Bhaskara,
Georgios Georgakis,
Jeremy Nash,
Marissa Cameron,
Joseph Bowkett,
Adnan Ansar,
Manoranjan Majji,
Paul Backes
IEEE Aerospace Conference (AeroConf), 2024
pdf / arXiv / code
|
|
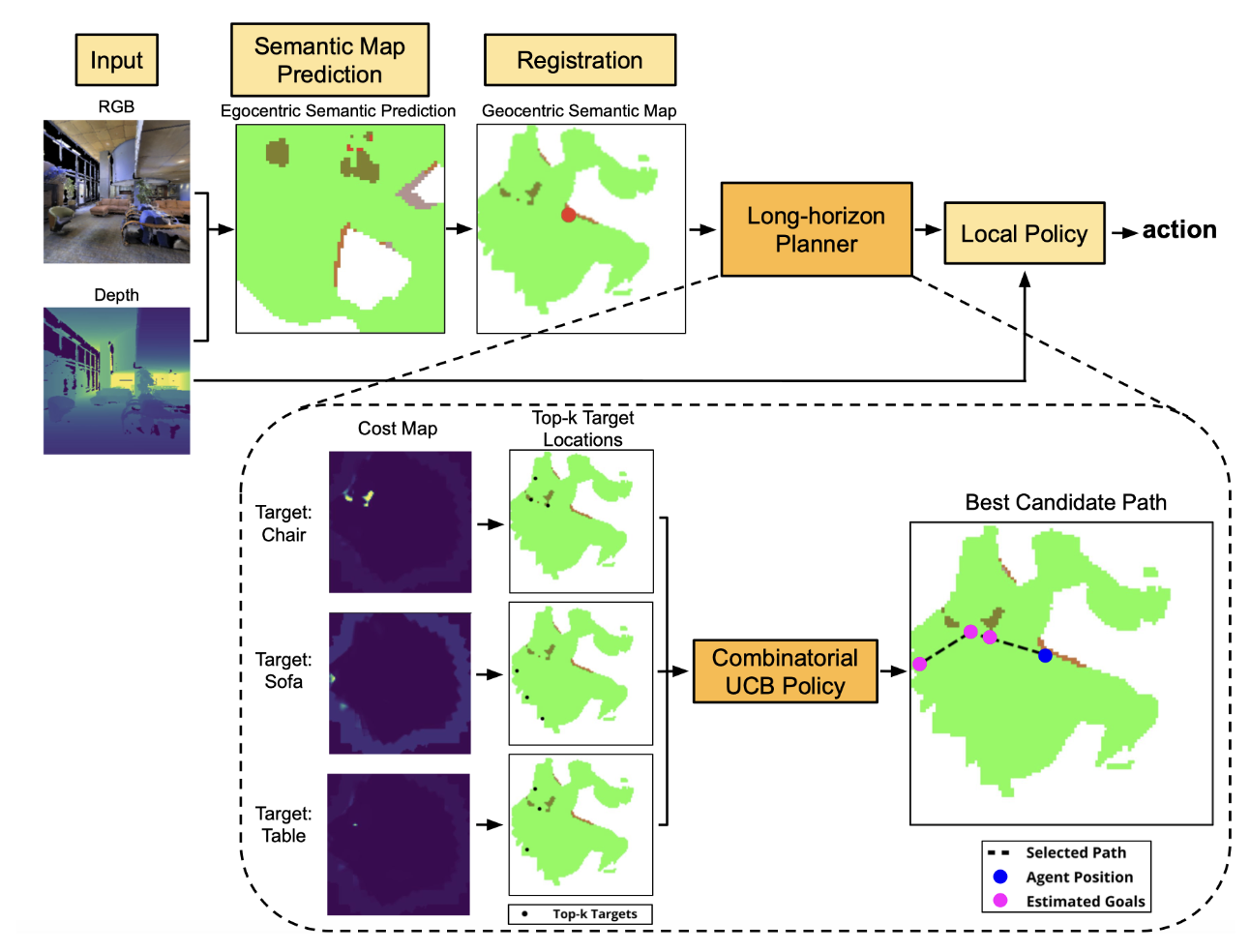
Unordered Navigation to Multiple Semantic Targets in Novel Environments
Bernadette Bucher*,
Katrina Ashton*,
Bo Wu,
Karl Schmeckpeper,
Siddharth Goel,
Nikolai Matni,
Georgios Georgakis,
Kostas Daniilidis
Embodied AI Workshop at CVPR, 2023
* equal contribution
pdf
|
|
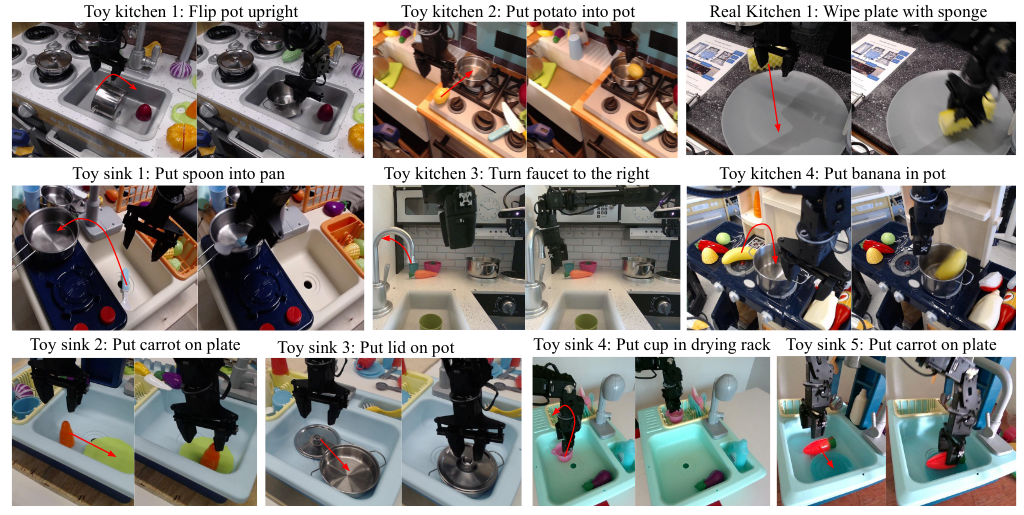
Bridge Data: Boosting Generalization of Robotic Skills with Cross-Domain Datasets
Frederick Ebert*,
Yanlai Yang*,
Karl Schmeckpeper,
Bernadette Bucher,
Georgios Georgakis,
Kostas Daniilidis,
Chelsea Finn,
Sergey Levine
Robotics: Science and Systems (RSS), 2022
* equal contribution
project page / pdf / arXiv
|
|
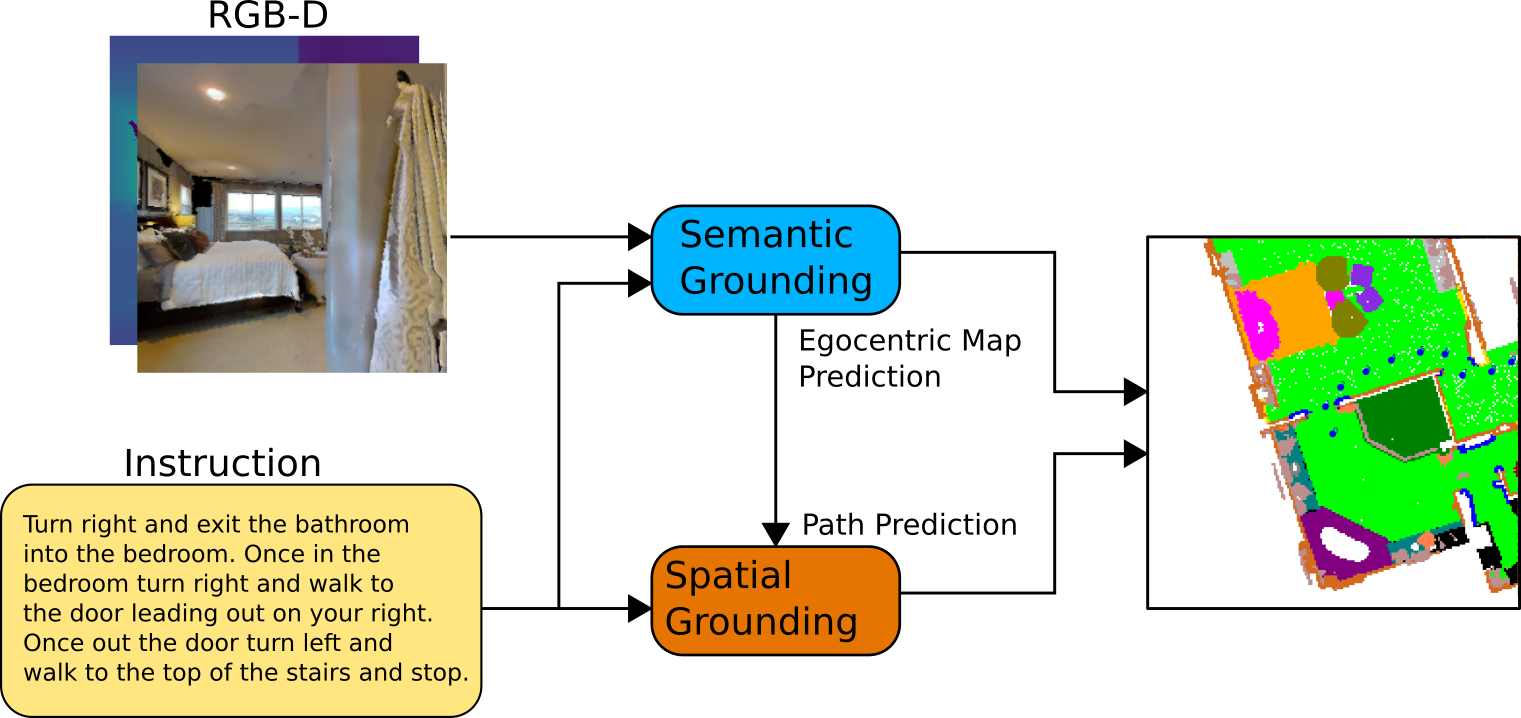
Cross-modal Map Learning for Vision and Language Navigation
Georgios Georgakis,
Karl Schmeckpeper,
Karan Wanchoo,
Soham Dan,
Eleni Miltsakaki,
Dan Roth,
Kostas Daniilidis
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022
project page /
pdf /
arXiv /
code /
talk video
|
|
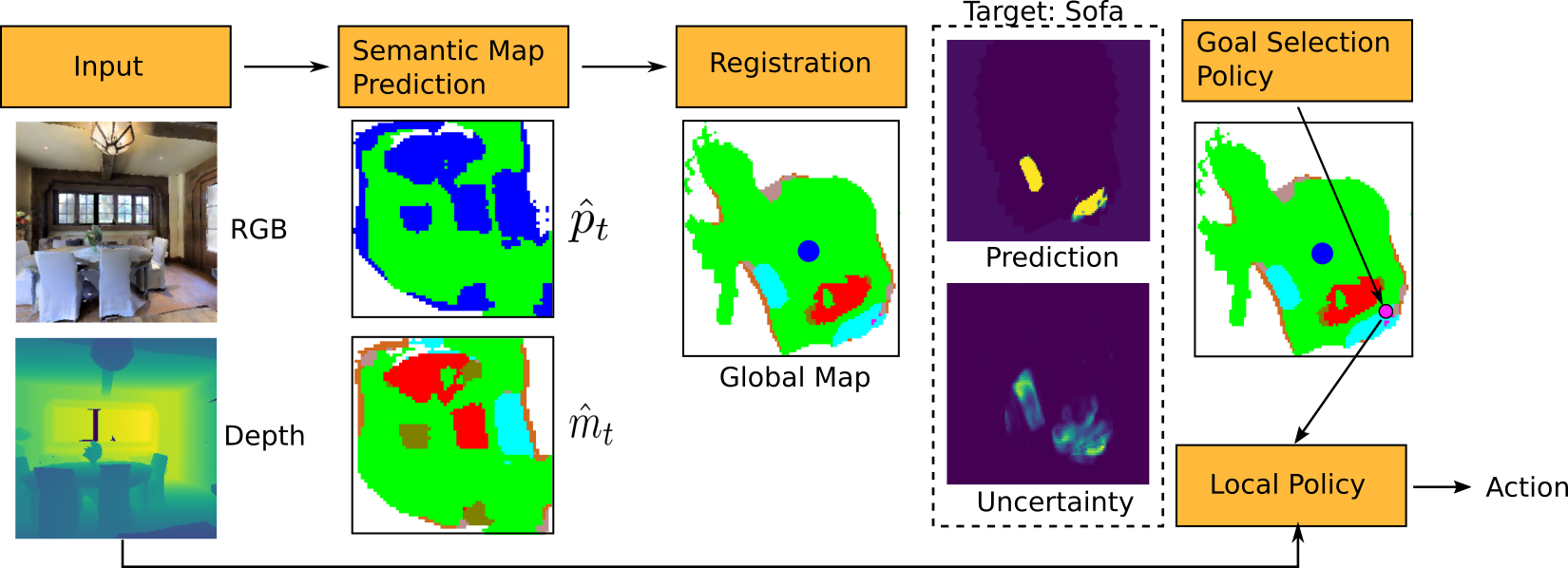
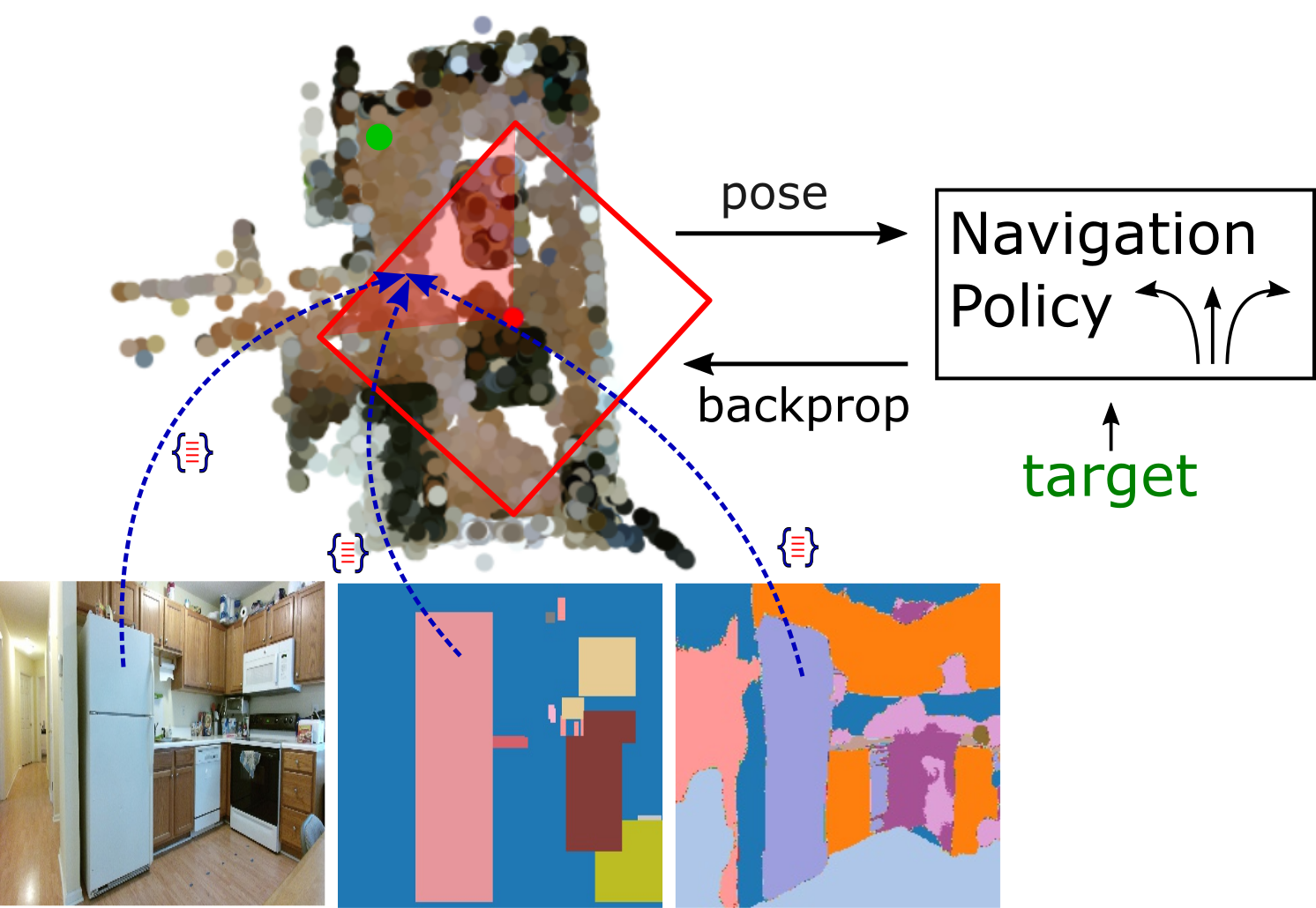
Learning to Map for Active Semantic Goal Navigation
Georgios Georgakis*,
Bernadette Bucher*,
Karl Schmeckpeper,
Siddharth Singh ,
Kostas Daniilidis
International Conference on Learning Representations (ICLR), 2022
* equal contribution
project page /
pdf /
arXiv /
code
|
|
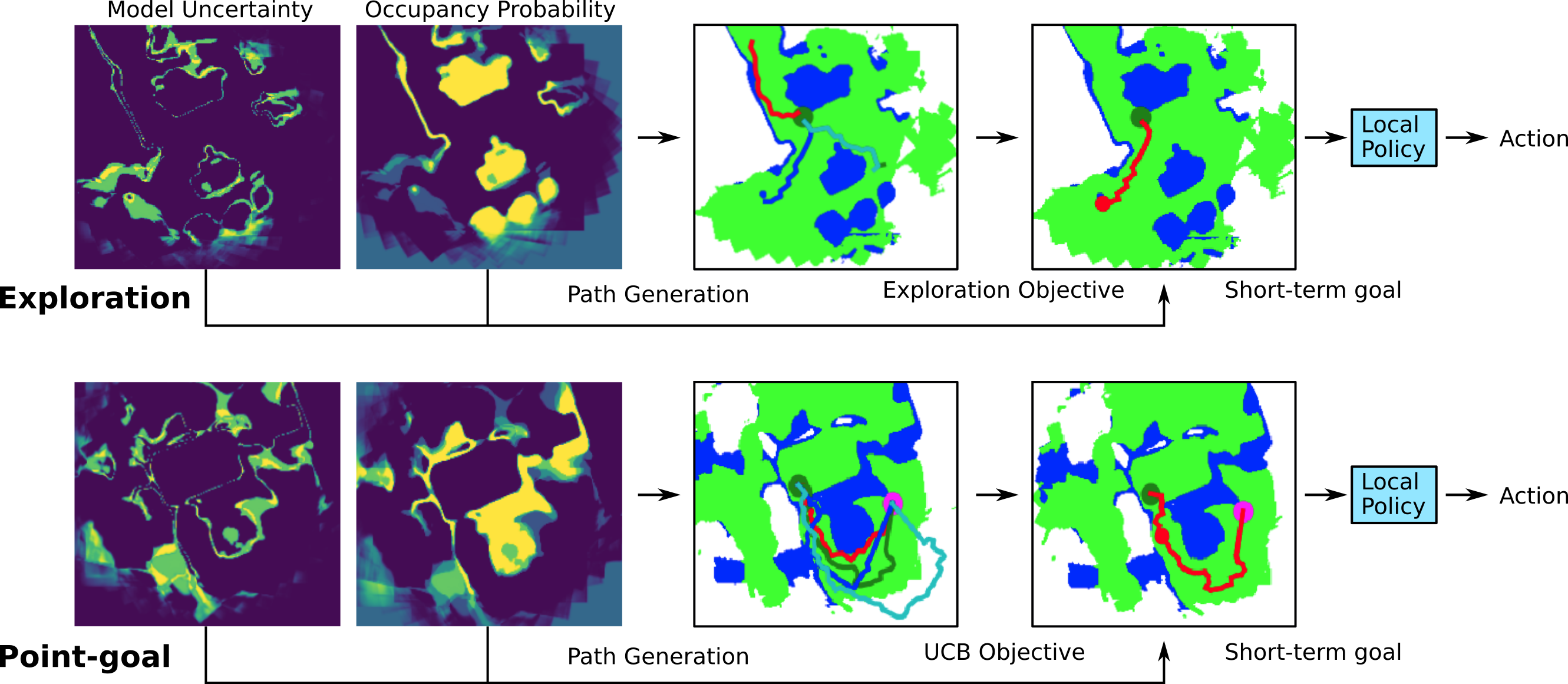
Uncertainty-driven Planner for Exploration and Navigation
Georgios Georgakis,
Bernadette Bucher,
Anton Arapin,
Karl Schmeckpeper,
Nikolai Matni,
Kostas Daniilidis
IEEE Conference on Robotics and Automation (ICRA), 2022
project page /
pdf /
arXiv /
code /
Demo @ICRA
|
|
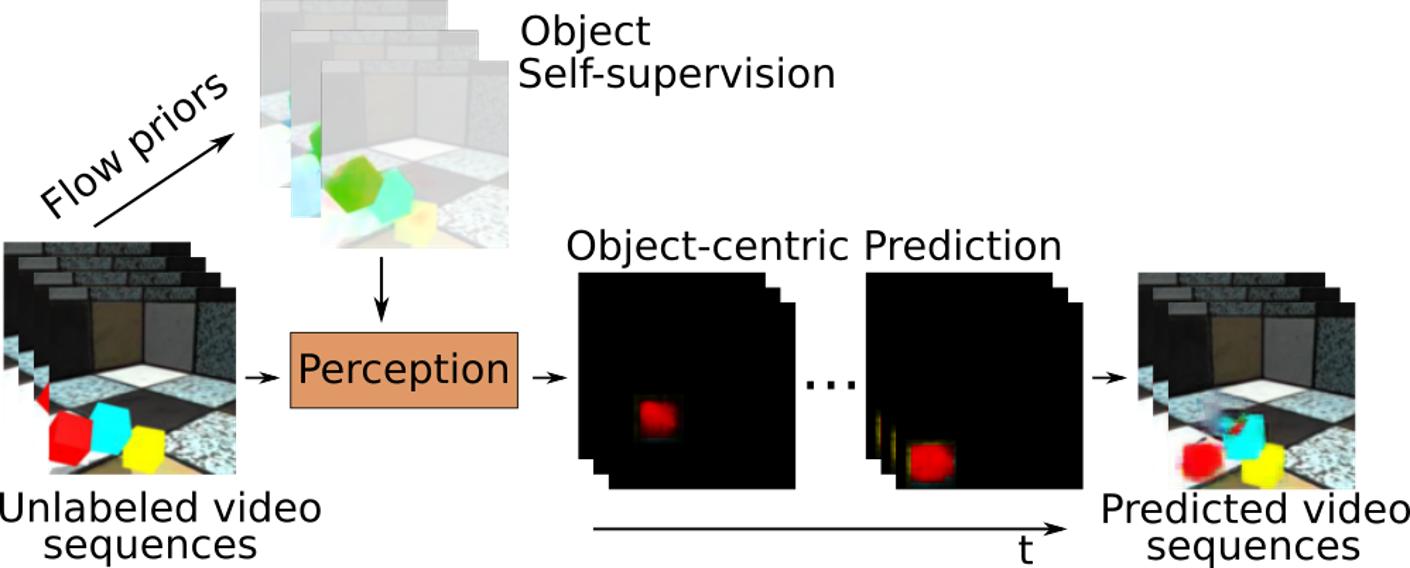
Object-centric Video Prediction without Annotation
Karl Schmeckpeper*,
Georgios Georgakis*,
Kostas Daniilidis
IEEE Conference on Robotics and Automation (ICRA), 2021
* equal contribution
pdf /
arXiv /
code /
slides video
|
|
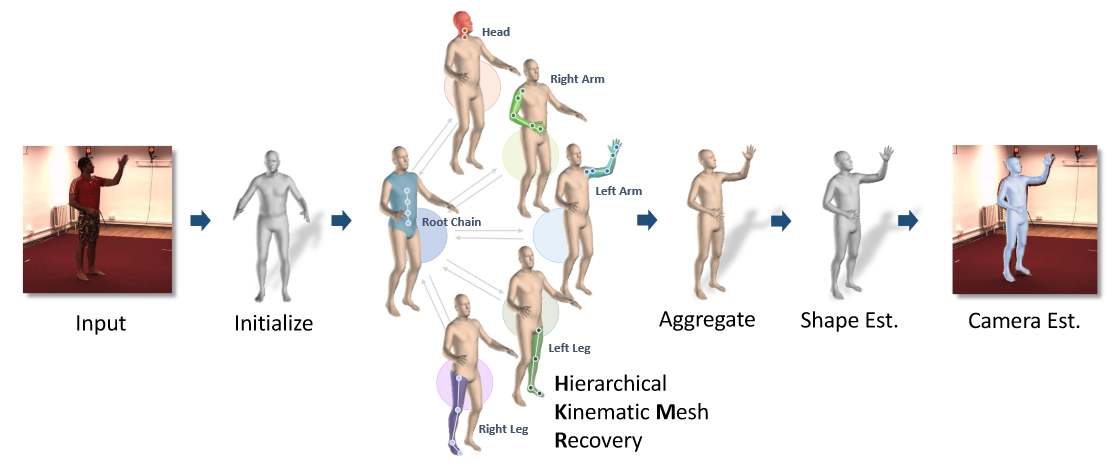
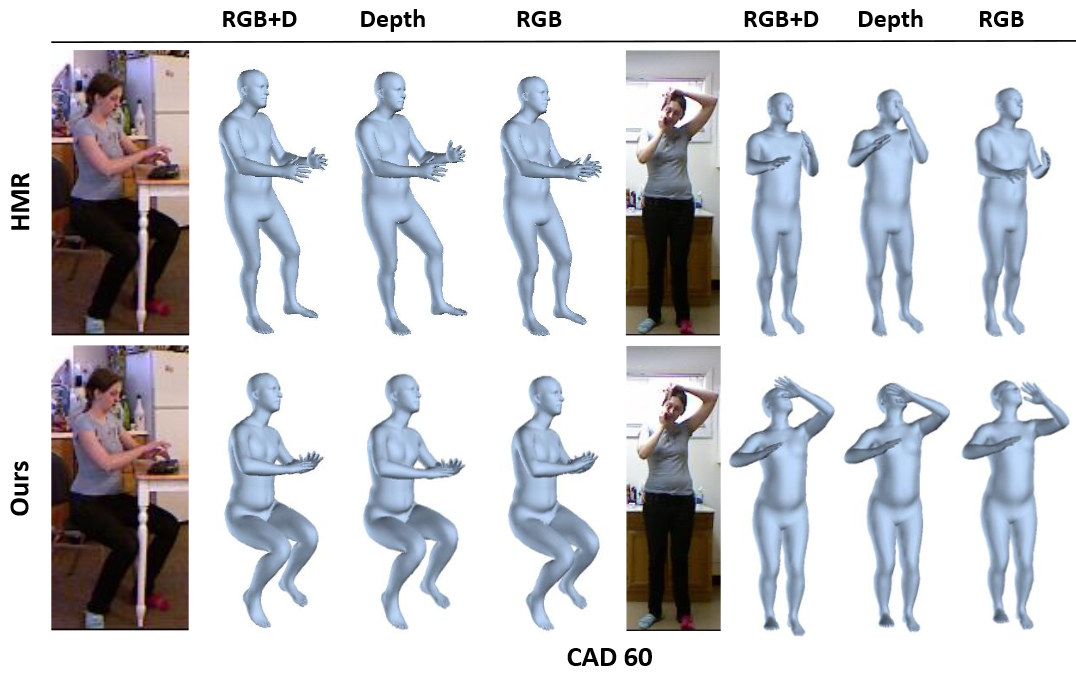
Hierarchical Kinematic Human Mesh Recovery
Georgios Georgakis*,
Ren Li*,
Srikrishna Karanam,
Terrence Chen,
Jana Kosecka,
Ziyan Wu
European Conference on Computer Vision (ECCV), 2020
* equal contribution
pdf /
supplementary /
arXiv /
long slides /
short slides /
long video /
short video
|
|
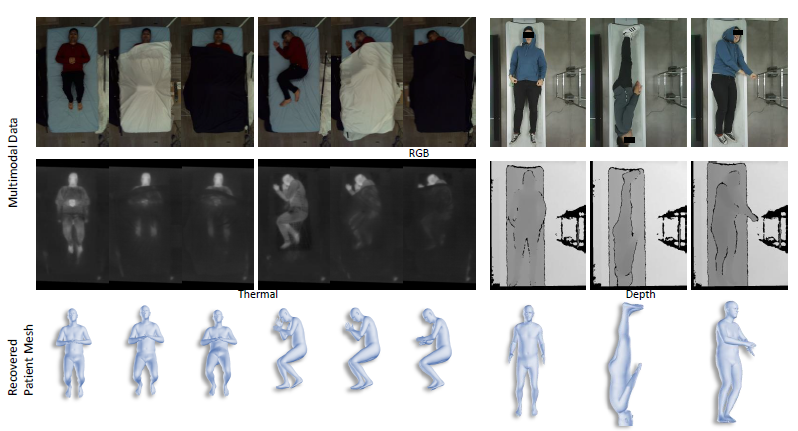
Robust Multi-modal 3D Patient Body Modeling
Fan Yang,
Ren Li,
Georgios Georgakis,
Srikrishna Karanam,
Terrence Chen,
Haibin Ling,
Ziyan Wu
Medical Image Computing and Computer Assisted Interventions (MICCAI), 2020
* equal contribution
pdf
|
|
Simultaneous Mapping and Target Driven Navigation
Georgios Georgakis,
Yimeng Li,
Jana Kosecka
arXiv:1911.07980, 2020
pdf /
code
|
|
Towards Robust RGB-D Human Mesh Recovery
Ren Li,
Changjiang Cai,
Georgios Georgakis,
Srikrishna Karanam,
Terrence Chen,
Ziyan Wu
arXiv:1911.07383, 2019
pdf
|
|
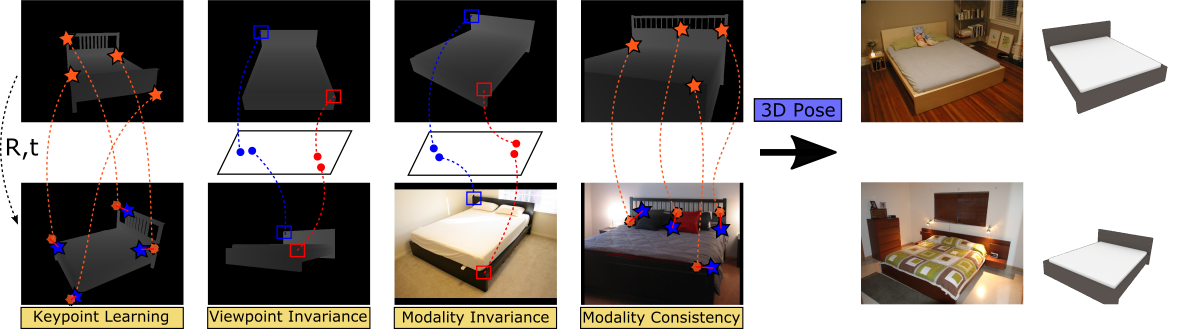
Learning Local RGB-to-CAD Correspondences for Object Pose Estimation
Georgios Georgakis,
Srikrishna Karanam,
Ziyan Wu,
Jana Kosecka
IEEE International Conference on Computer Vision (ICCV), 2019
pdf /
slides /
poster
|
|
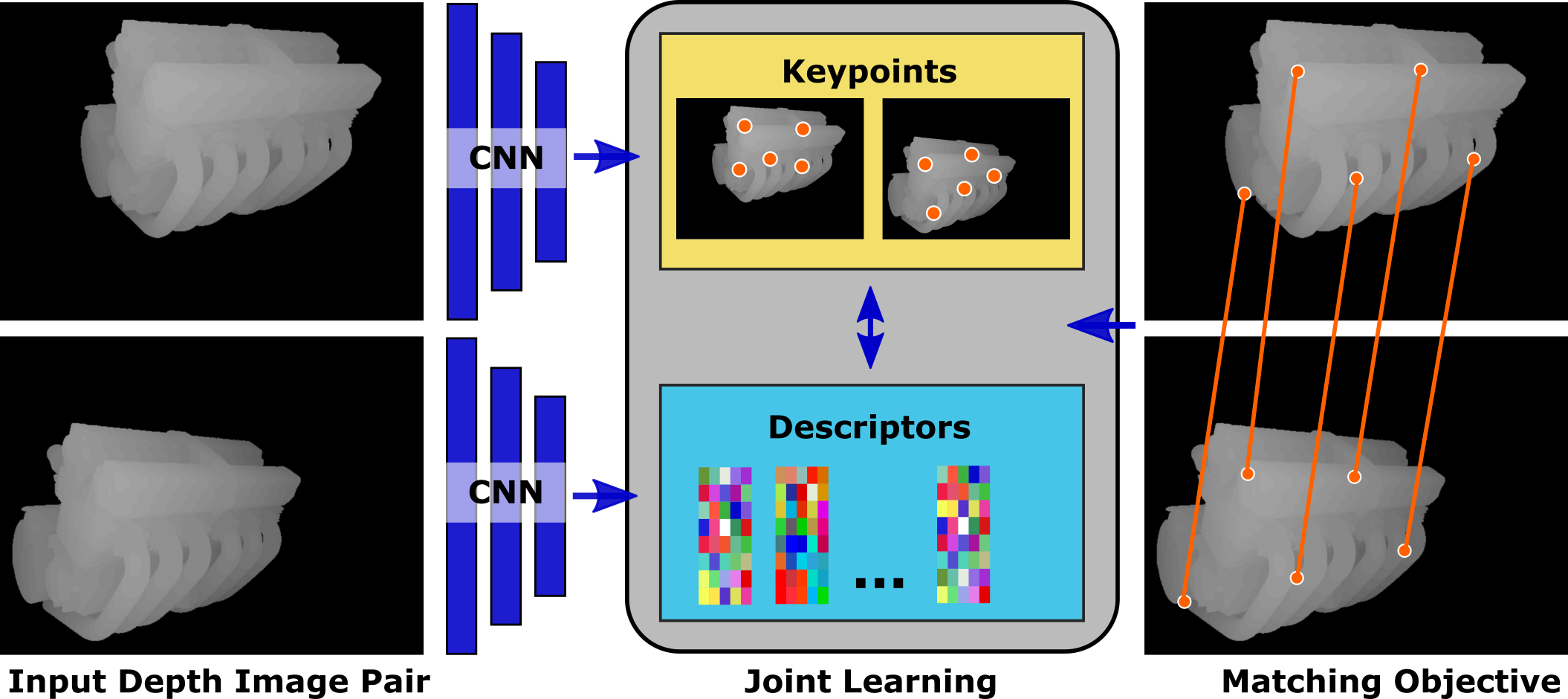
End-to-end Learning for Keypoint Detection and Descriptor for Pose Invariant 3D Matching
Georgios Georgakis,
Srikrishna Karanam,
Ziyan Wu,
Jan Ernst,
Jana Kosecka
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2018
pdf /
supplementary /
poster
|
|
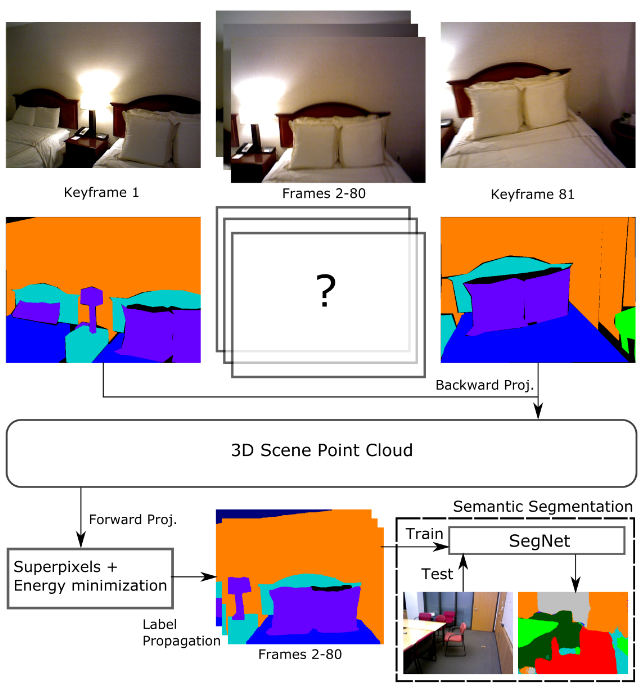
Label Propagation in RGB-D Video
Md Alimoor Reza,
Hui Zheng,
Georgios Georgakis,
Jana Kosecka
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017
pdf
|

|
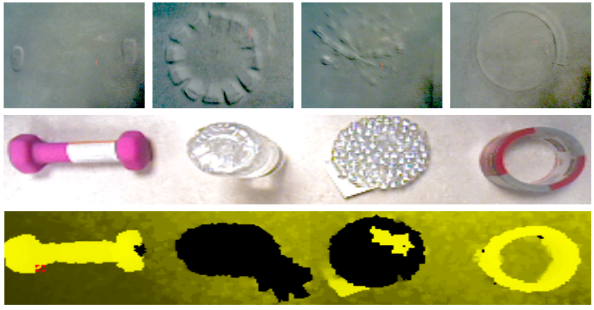
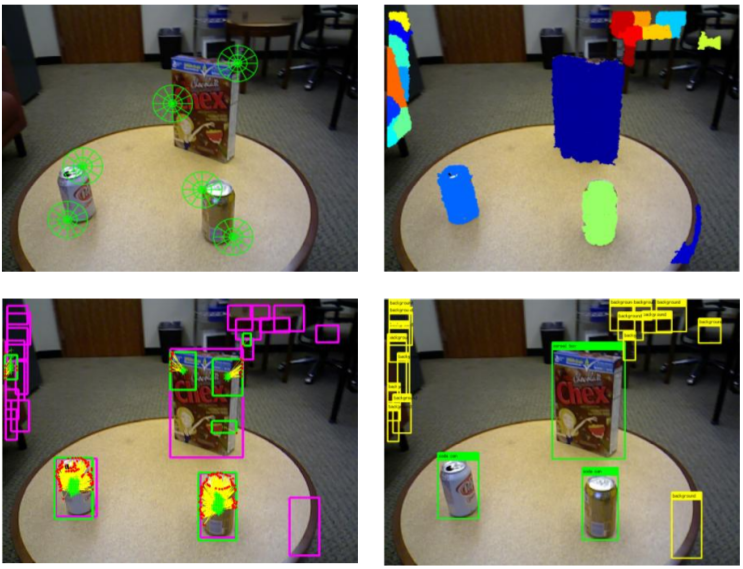
Synthesizing Training Data for Object Detection in Indoor Scenes
Georgios Georgakis,
Arsalan Mousavian,
Alexander C. Berg,
Jana Kosecka
Robotics: Science and Systems (RSS), 2017
project page /
pdf /
poster /
slides /
video
|
|
A Contact Exploitative Approach to the Amazon Robotics Challenge
Eadom Dessalene,
Georgios Georgakis,
Md Alimoor Reza,
Yimeng Li,
Yossi Ovcharik,
Amir Shapiro,
Jana Kosecka,
Daniel Lofaro
Warehouse Picking Automation Workshop at ICRA, 2017
pdf
|
|
Multiview RGB-D Dataset for Object Instance Detection
Georgios Georgakis,
Md Alimoor Reza,
Arsalan Mousavian,
Le Phi-Hung,
Jana Kosecka
International Conference on 3D Vision (3DV), 2016
project page /
pdf /
arXiv /
poster
|
|
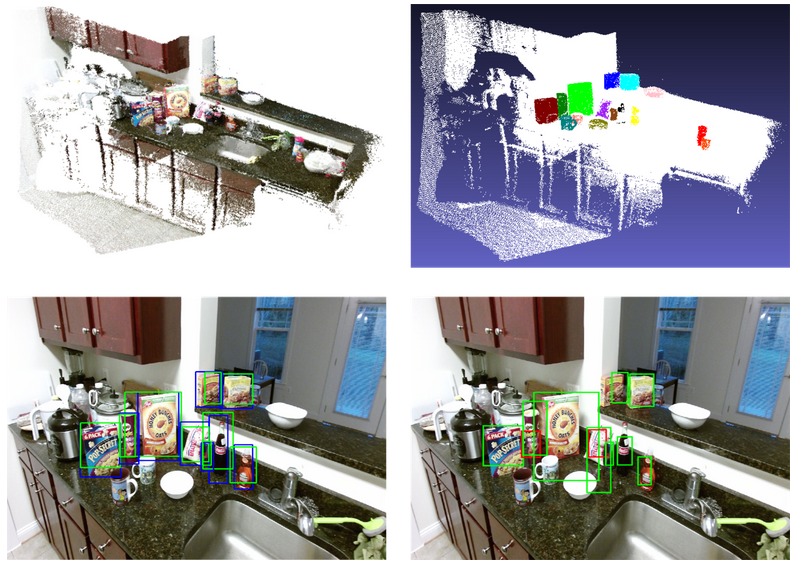
RGB-D Multiview Object Detection with Object Proposals and Shape Context
Georgios Georgakis,
Md Alimoor Reza,
Jana Kosecka
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016
pdf /
poster /
short slides /
code
|
|
Teaching
|
-
Instructor, University of Pennsylvania
ESE 650 Learning in Robotics, Spring 2022
Website /
Notes: Spring 2021 from Pratik Chaudhari
-
Graduate Teaching Assistant, George Mason University
CS112: Introduction to Programming, 2014-2017
CS480: Introduction to Artificial Intelligence, 2019
|
|
Awards
|
- Team Award, “For Lunar Navigation Maps (LuNaMaps) project to address key gaps in mapping for Lunar TRN”
Robotic Systems Section, Jet Propulsion Lab, September 2025
- Team Award, “For technical contributions and leadership in advancing robotic autonomy”
Robotic Systems Section, Jet Propulsion Lab, September 2025
- Technology Spotlight Award, “Map-based Localization for Ingenuity flights”
Autonomous Systems Division, Jet Propulsion Lab, August 2025
- Technology Spotlight Award, “Photometric Calibration of JunoCam with a Data-driven Method”
Autonomous Systems Division, Jet Propulsion Lab, May 2024
|
|
Selected Talks
|
|
|
Selected Patents
|
-
Method and System for On-board Localization,
Roland Brockers,
Friedrich Dietsche,
Jeff Delaune,
Pedro Proença,
Robert Hewitt,
Georgios Georgakis
US18/312,444 filed May 2023, Application no. US20230360547A1
-
Systems and Methods for Human Pose and Mesh Recovery,
Ziyan Wu,
Srikrishna Karanam,
Changjiang Cai,
Georgios Georgakis
US16/995,446, filed August 2020, Application no. US20210158028A1
-
Learning Keypoints and Matching RGB Images to CAD Models,
Georgios Georgakis,
Srikrishna Karanam,
Ziyan Wu,
Jan Ernst
PCT/US2019/053827, filed September 2019, Application no. WO2020086217
|
|